


激光雷达用多面体反射镜和激光扫描仪 特集 第2卷
激光雷达用多面体反射镜和激光扫描仪 特集 第2卷
第 5 章
关于激光雷达以易于理解的方式进行解释
什么是激光雷达?
本篇是从自动驾驶汽车传感器中挑选激光雷达来说明。
激光雷达是扫描激光束时照射对象物体,通过测量照射到物体弹回的时间来测定离物体的距离和位置,或确定对象物性质的光传感器技术。
是英语中的 “Light Detection and Ranging” 的缩写,被称为激光雷达 (LiDAR)。
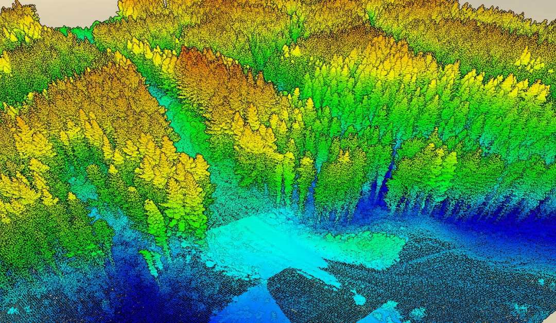
激光雷达的发展最初是应用于人造卫星和飞机上,作为测量地形,建筑物和森林结构等的测量技术。
是英语中的 “Light Detection and Ranging” 的缩写,被称为激光雷达 (LiDAR)。
激光雷达的发展最初是应用于人造卫星和飞机上,作为测量地形,建筑物和森林结构等的测量技术。
最近开始开发出小型轻便型的激光雷达,可以安装在无人机上进行测量,甚至可以生成精确的 3D 测绘数据。

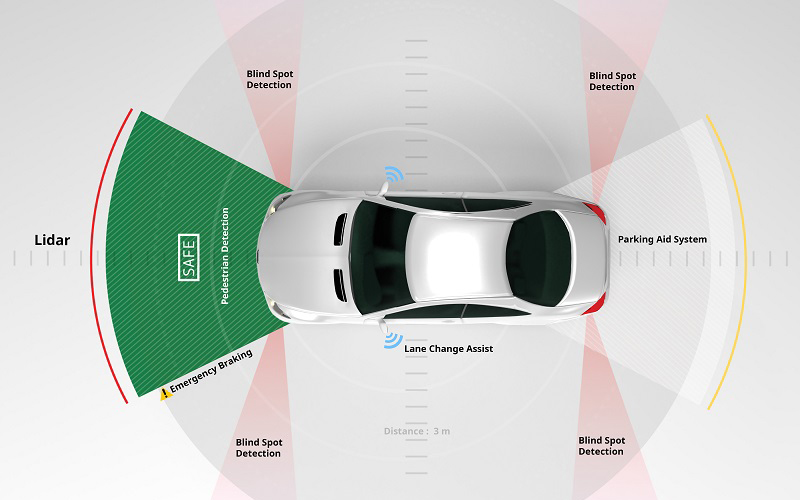
而且利用其高度的视觉识别功能,可期待今后在汽车自动驾驶上将发挥更加积极的作用。激光雷达是用于创建自动驾驶所需的 3D 测绘数据和识别周围环境 (行人,汽车等)。
激光雷达在自动驾驶中履行的作用
一言以蔽之,自动驾驶也有明确的级别分类定义。以下参考美国运输部 NHTSA 发表的 SAE (Society of Automotive Engineers),公益社团法人汽车技术公司制定的 “汽车自动驾驶的自动化系统的级别分类及其定义” 的图像。

在Level 2之前是基于自动刹车和ACC (自动巡航), LKAS (车道保持行驶) 的ADAS (驾驶辅助系统) 范畴,而真正被称为自动驾驶的是在 Level 3 级别之后。
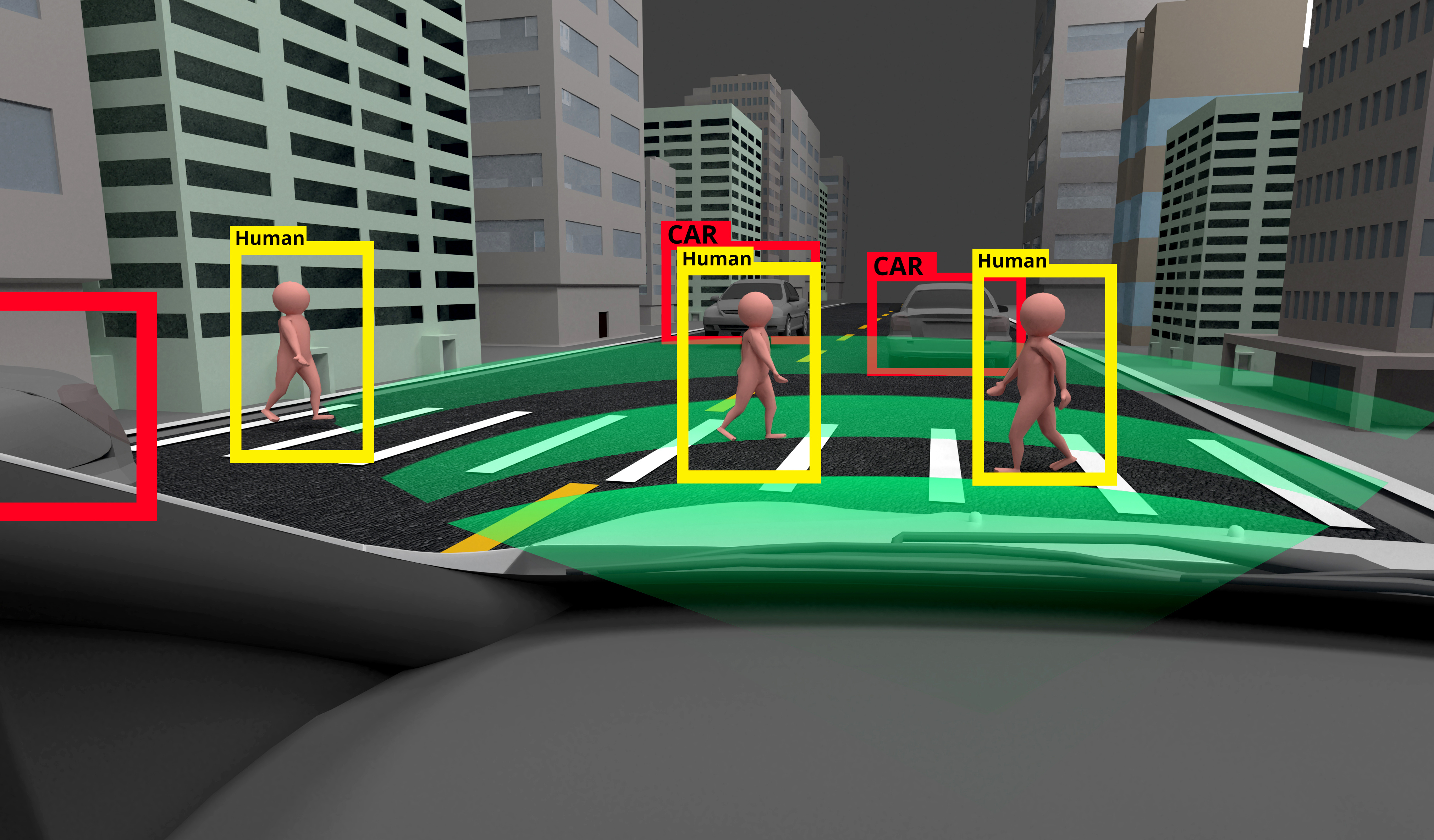
当然,自动驾驶的技术动向也以日新月异的速度在变化,目前在现有的技术中,配备在自动驾驶车上的传感器是视频摄像头和毫米波雷达,激光雷达,这3种为主流。其中,激光雷达具有优异的方位分辨率,比前两个传感器都要突出,激光雷达能够精确地检测到与周围障碍物的距离和位置关系,并且能够毫无困难地检测到具有低无线电波反射率的物体 (标志,树木等),因此,被定位为上述 Level 3,Level 4 级别或更高的实际自动驾驶级别时所必需的传感器技术。
