


For LiDAR scanning solution ポリゴンミラー&ポリゴンレーザスキャナ 特集
For LiDAR scanning solution ポリゴンミラー&ポリゴンレーザスキャナ
Chapter 1
LiDARスキャニングの進化
自動運転におけるLiDARスキャンの最適化
自動運転対応の自動車には、その位置と周囲を特定するためのさまざまなセンサが装備されています。
センサには、GPS、慣性ナビゲーションシステム、カメラ、ミリ波レーダ、LiDARなどがありますが、うち、LiDARは、従来のレーダより高い分解能を持ち、暗闇の中でも問題なくその効果を発揮します。
LiDARとは、その呼称からもレーザレーダの意味を包含しており、ターゲットにレーザを照射してその距離を測定する測量方法。1つまたは複数の赤外線レーザを迅速に2Dスキャンすることで3D画像を生成します。
ここでは、自動車の衝突回避/自動運転用のLiDARについて、その最適な手法を説明してまいります。 まず、ポリゴンレーザスキャナやガルバノスキャナを使用したレーザビームスキャン方式との比較として、以下、垂直方向に固定して配置した複数のレーザ射出機を水平走査させる従来方式のやり方を例にあげて説明します。
よく知られているLiDARのレーザ走査技術は、水平走査(回転)するレーザ射出機を、垂直方向に一定の角度配分をもって複数配置させるものです。30°の垂直走査を行うため16個のレーザを縦に配置させるのが典型的な構成ですが、この場合の垂直方向における分解能は2°になります。
これをイメージ化したものが次の図1になります。
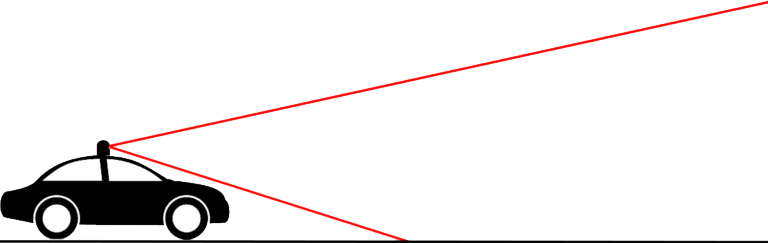
[図1] LiDAR 衝突回避①: 平坦な一般道(低速) ⇒ 30°の垂直走査範囲
この垂直30°の設定のレーザ走査によって、走行車両前方の歩行者や自動車はもちろん、自動駐車の際のガレージ天井にある障害物も検出可能になります。この固定された垂直2°の解像度においては、10メートル先の距離でレーザビームの間隔は350mmになりますので、低速においてこの距離は衝突回避に適したものと言えます。ただし、距離が50メートル先となると、ビーム間隔は1.75メートルに増加しますので、歩行者や自動車を検出することは難しくなり、さらに100メートル先ではビーム間隔は3.5メートルになりますので、トラックを検出することさえ困難になります。
では次に、坂道や高速環境において走行する場合のLiDARの様子を見てみましょう。
上り坂に近づきますと、図2に示しますように、レーザ走査の垂直範囲は、結果的に20°にまで縮まります。
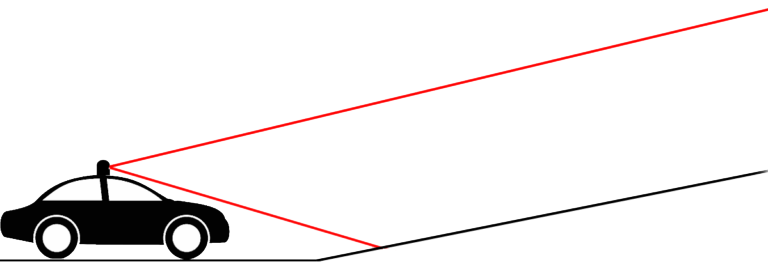
[図2] LiDAR 衝突回避②: 一般道上り坂(低速) ⇒ 20°の垂直走査範囲
下り坂では、次の図3に示しますように、レーザ走査の垂直範囲が瞬時に下方10°の範囲にシフトします。
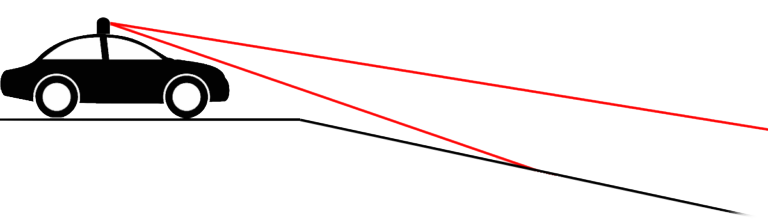
[図3] LiDAR 衝突回避③: 一般道下り坂(低速) ⇒ 下方に10°の垂直走査範囲
また、高速道路では(高速走行すると)、図4に示しますように、レーザ走査の垂直範囲は10°の範囲にシフトします。

[図4] LiDAR 衝突回避④: 高速道路 ⇒ 10°の垂直走査範囲
以上を念頭に、例えば、ポリゴン+ガルバノスキャナ方式において、垂直走査が図1と同じ16ライン分の範囲とした場合(低速で30°)、高速道路の走行においては、衝突検知において適正な走査範囲・解像度が自動調整され、垂直走査範囲は10°に縮まり、かつ分解能は3倍になります。(以下、このポリゴン+ガルバノスキャナ方式における走査範囲・分解能の最適設定を「AOI」と総称します。)
では、ポリゴン+ガルバノスキャナ方式のLiDARシステムにおいて、AOIをいつどのように環境に適応・変化させているのでしょう?低速での30°の垂直走査範囲は、目の前にある物体や駐車障壁の上物を検知するのに非常に適した範囲設定でした。一方、高速道路では停止距離が長くなりますので、速度が上がるに連れて検知する対象をより遠い先まで早く検知する必要があります。この場合、むしろ、すぐ目の前の2メートル先の障害物を検知するニーズは乏しくなりますので、AOIは上下の検知範囲を狭くすることにより、分解能も上がり、前方先のターゲット距離も長くとれるようになります。つまり、AOIはスピードの変化に応じて調整がなされていることになります。
同様に、走行車両が上り/下り勾配に差し掛かったときにも、LiDARシステムは、定期的(速度に応じて大よそ1秒に1回程度)に最適値を瞬時に調べ上げ、AOIをどこに設定したら良いかを見極めます。このプロセスは、走行中のロード、加速、制動およびバンプによる車両ピッチも自動的に補償しています。
では、レーザ射出機回転方式 vs レーザビームスキャン方式を比べてみましょう。前者の回転するレーザ射出機を垂直に配列する方式では、16個のレーザとこれを回転させるドラムヘッドが各々必要になりますので、かなり高価です。この従来方式のLiDARで解像度を上げようとすると、レーザーと検出器を追加しなければなりませんので、コストとサイズはますます増えるばかりです。
ポリゴンレーザスキャナは、16個のレーザー各々に設けられた回転ドラムよりもはるかに高速に回転できます。そのため、ポリゴンレーザスキャナは、より少ないレーザでより高解像度の画像が得られ、対象領域のみを照射しますので、スキャン使用の効率化も非常によく図られています。
