


激光雷達用多面體反射鏡和激光掃描器 特集 第1卷
激光雷達用多面體反射鏡和激光掃描器 特集 第1卷
第 1 章
自動駕駛車輛用激光雷達
可變式視場角激光雷達在自動駕駛車輛中的優勢
自動駕駛配備各種傳感器來確定它們的位置和周圍環境。傳感器包括,慣性導航系統(INS)與全球衛星定位系統(GPS)、攝像機、雷達和激光雷達。激光雷達比傳統毫米波雷達具有更高的分辨率,並且黑暗環境中也可以檢測。
本文討論使用激光雷達的優化方案,以避免車輛路徑中的碰撞。涉及激光雷達為了創建三維圖像,快速掃描一個或多個二維紅外激光掃描在內。在這裡,我們將使用帶有振鏡掃描儀的多邊形激光掃描器在可變的垂直掃描角度內移動一個或多個激光,將比較以固定的垂直掃描角旋轉雷達和檢測器的垂直陣列。
眾所周知,激光雷達掃描技術是旋轉激光垂直陣列,讓垂直方向360度水平掃描。典型的配置有30度掃描的16個激光器的垂直陣列。垂直分辨率為2度。在圖1中示出了30度掃描。
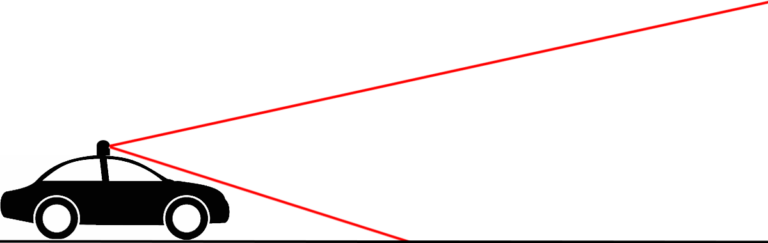
[圖1] 用於避免碰撞的30度激光雷達掃描
30度垂直掃描可以檢測,自動駕駛車輛前方靠近的道路上的物體,也可以檢測到上下斜坡的停車場的障礙物。固定的2度垂直分辨率,在10米的距離處提供350毫米的光束間距。光束間距在50米的距離上增加到1.75米,使得很難探測到行人或汽車,在100米的距離上增加到3.5米,使得很難探測到卡車。
接近山丘時,感興趣的區域可以20度掃描,如下面的圖2所示。
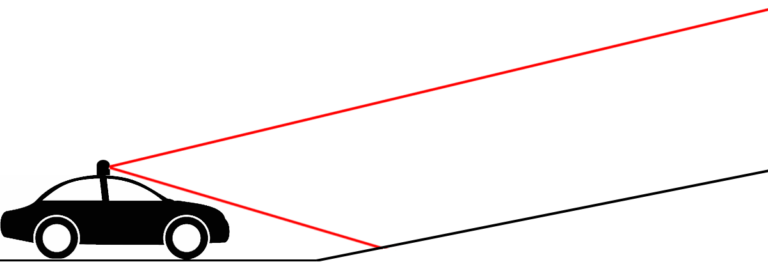
[圖2] 激光雷達20度掃描接近山丘
在山頂上,感興趣的區域可以立即向下移動,10度掃描。如下面的圖3所示。
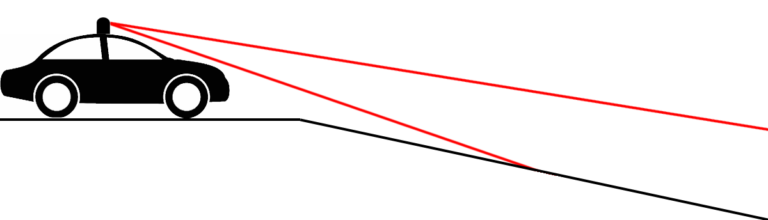
[圖3] 激光雷達10度掃描爬山
以公路速度行駛,感興趣的區域可以水平10度掃描。 如下面的圖4所示。

[圖4] 激光雷達高速驅動10度掃描
如果激光雷達的多邊形/振鏡掃描只有16線垂直分辨率(如上圖1所示)。在高速行駛時將低速時的入射角30度降低到10度,使分辨率提高三倍,從而在更高速度下提供更長的防撞範圍。
多邊形/振鏡激光雷達系統,如何把入射角適應於不斷變化的環境呢?在低速時,入射角30度掃描可用於AV前方裡,方便掃描車輛上方的停車障礙物。隨著速度的增加,停止距離也增加,需要更長的掃描距離。這時無需尋找停車障礙物,所以無需看車輛前方兩米,因此入射角縮小與速度有關。
至於接近山頂,激光雷達會定期(取決於速度,可每秒鐘一次)快速探測哪處需要調整入射角。該過程還將自動補償由於道路中的負載,加速,制動和顛簸引起的車輛俯仰。
旋轉激光器與旋轉激光束。 16組垂直激光器和探測器的旋轉頭很昂貴的。增加更多激光器和探測器以提高分辨率會增加此類激光雷達的成本和尺寸。
多邊形掃描儀比帶有16個激光器和探測器,旋轉得快得多。因此,多邊形掃描儀能夠以較少的激光獲得較高分辨率的圖像,並且針對感興趣區域有效地掃描。
例如,一个四面多边形,仅移动八个固定激光器的光束,以速度5,000rpm扫描,垂直分辨率为2667条/秒,120度水平扫描。在10Hz,非隔行扫描下,检流计式垂直分辨率267条。在100m和10度入射角下,这给出了66mm的垂直分辨率。
