


LiDAR 스캐닝 솔루션
폴리곤 미러&폴리곤 스캐너
LiDAR 스캐닝 솔루션
폴리곤 미러&폴리곤 스캐너
제 1 장
LiDAR 스캐닝의 발전
자동 운전에 있어서 LiDAR 스캐닝의 최적화
자율주행자동차는 그 위치와 주위를 특정하기 위한 다양한 센서가 장착되어 있습니다.
센서에는 GPS, 관성항법시스템(INS), 카메라, 레이더, 라이다 (Light Detection And Ranging) 등이 있습니다.다만, LiDAR는 기존의 RF레이더보다 높은 해상도를 가지고 있어 어둠속에서도 아무 문제없이 그 효과를 발휘합니다 .
LiDAR는 원래 빛 (Light)과 레이더 (Radar)를 섞은 조어이지만, 목표물체에 레이저를 조사하여 그 거리를 측정하는 측량 방법. 하나 혹은 여러개의 적외선 레이저를 신속하게 2D 스캔하여 3D 이미지를 생성합니다.
여기에서는 자동차 충돌 회피/자율주행용 LiDAR 대하여 그 최적의 방법을 설명하겠습니다. 먼저 폴리곤 레이저 스캐너와 갈바노 스캐너를 사용한 레이저빔 스캔 방식과의 비교로 다음 수직으로 고정 배치 된 여러개의 레이저 사출기 자체를 수평 주사하는 기존 방식을 예로 들어 설명합니다.
일반적인LiDAR 레이저 스캐닝 기술은 수평 주사 (회전)하는 레이저 사출기를 수직 방향으로 일정한 각도 분포를 가지고 여러개 배치하는 것입니다. 30°의 수직 스캔을 수행하는 16개의 레이저를 세로로 배치시키는 것이 전형적인 구성입니다.이 경우의 수직 방향의 분해능은 2°입니다. 이를 이미지화 한 것이 다음의 그림 1입니다.
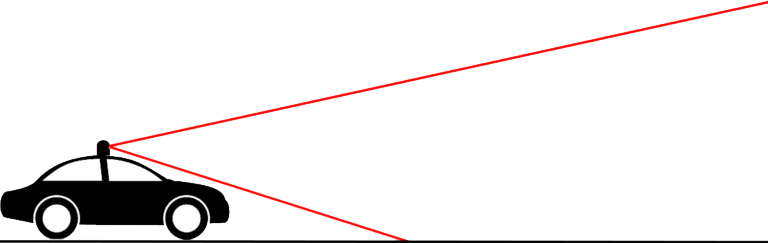
[그림 1] LiDAR 충돌 회피 : ① 평평한 일반 도로 (저속) ⇒ 30°의 수직주사 범위
이 수직 30°의 설정 레이저 주사에 의해 주행 차량 전방의 보행자와 자동차는 물론, 자동 주차시 주차장 천장에 있는 장애물도 감지할수 있습니다. 이 고정 된 수직 2°의 해상도에서는 10m거리에서 레이저 빔의 간격은 350mm이기 때문에 저속에서 이 거리는 충돌 회피에 적합한것이라고 말할수 있습니다. 그러나 거리가 50m되면, 빔 간격은 1.75m로 증가하기 때문에, 보행자나 자동차를 감지하는 것은 어렵게 돼고 또한 거리가 100m되면 빔 간격은 3.5m되므로 트랙조차 감지하기 어렵습니다.
그럼 다음 언덕길이나 고속도환경에서 주행하는 경우의 LiDAR의 모습을 살펴봅시다.
오르막에 접근하면 그림 2에 나타내는것처럼, 레이저 스캐닝의 수직 범위는 결과적으로 20°까지 줄어 듭니다.
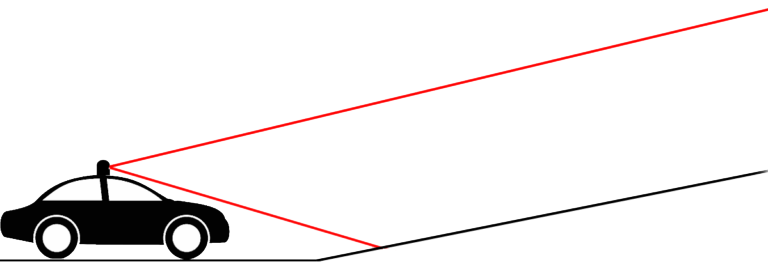
[그림 2] LiDAR 충돌 회피 : ② 일반 도로 오르막 (저속) ⇒ 20°의 수직주사 범위
내리막 길에서는 다음의 그림 3에 나타내듯이, 레이저 스캐너의 수직 범위가 순간적으로 하향 10 °의 범위로 이동합니다.
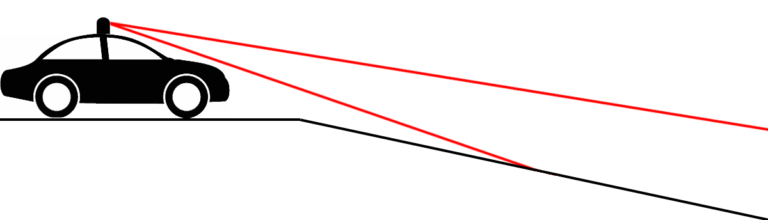
[그림 3] LiDAR 충돌 회피 : ③일반 도로 내리막 (저속) ⇒ 아래로 10°의 수직주사 범위
또한 고속도에서(고속 주행하면) 그림 4에 나타내듯이, 레이저 스캐닝의 수직 범위는 10 °의 범위로 이동합니다.

[그림 4] LiDAR 충돌 회피 : ④ 고속도로 ⇒ 10°의 수직주사 범위
이상을 염두에 예를 들면, 폴리곤 + 갈바노 스캐너 방식에서 수직스캔이 그림 1 같은 16 라인 분의 범위로 한 경우(저속도로 30도), 고속도로 주행에서는 충돌 감지에 적절한 주사 범위·해상도가 자동 조절되어 수직 범위는 10°에 긴축하고 해상도는 3배로 됩니다. 이하 폴리곤 + 갈바노방식의 주사 범위 · 해상도의 최적 설정을 "AOI (Automated Optical Inspection, 자동 광학 검사)"이라고 총칭합니다.
그렇다면 폴리곤 +갈바노 스캐너방식의 LiDAR 시스템에서 AOI를 언제 어떻게 환경에 적응·변화시키고있는 것일까?저속에서 30° 의 수직 스캔 범위는 눈 앞에 있는 물체와 주차라문의 상물을 감지하는데 매우 적합한 범위설정입니다.
한편, 고속도로에서는 제동 거리가 길어지기 때문에 속도 상승에 따라 감지대상도 더욱더 먼곳까지 조속히 검출감지해야 합니다. 이 경우 오히려 바로 앞에 2m 장애물을 감지 할 필요는 적으지므로 AOI는 상하 감지 범위를 한정함으로, 해상도가 높아지고 전방의 목표물감지거리도 길어집니다. 뿐만 아니라 주행 차량이 오르막/내리막 구배에 접어 든 경우에도 LiDAR 시스템은 정기적으로 (속도에 따라 대개 1초에 1회 정도)에 최적 값을 즉시 확인하고 AOI를 어디에 설정 하면 좋은가를 판별합니다. 이 프로세스는 주행 중 도로, 가속, 제동 및 충돌에 의한 차량 피치도 자동으로 보상하고 있습니다.
그럼 레이저 사출기 회전 방식 vs 레이저 빔 스캐닝 방식을 비교해 보자 전자의 회전하는 레이저 사출기를 수직으로 배열하는 방식으로 16개의 레이저와 이를 회전시키는 드럼 헤드가 각각 필요하므로 상당히 비싸다. 이 종래 방식의 LiDAR로 해상도를 올리려고하면 레이저 감지기를 추가해야하기 때문에 비용과 크기는 점점 늘어날뿐입니다.
폴리곤 레이저 스캐너는 16개의 레이저 각각에 마련된 회전 드럼보다 훨씬 빠르게 회전 할 수 있습니다.따라서 폴리곤 레이저 스캐너는 더 적은 레이저로 더 높은 해상도의 이미지를 얻을수 있고 또한 대상 영역만을 조사하기 때문에 스캔 사용의 효율화도 잘 이루어지고 있습니다.
예를 들어, 8개의 고정 레이저 빔만을 5,000rpm의 속도로 수평 주사하는 4면 폴리곤 미러를 갖춘 폴리곤 레이저 스캐너는 120°의 넓은 범위를 속도 2667라인/초로 빔을 수평 주사할수 있습니다.갈바노 스캐너도 10Hz의 비 인터레이스 비디오 속도로 267 라인의 수직 해상도의 스캔이 가능하므로 거리 100m 10°의 AOI에서 66mm의 수직 해상도를 실현하고 있는것입니다.
