


激光雷达用多面体反射镜和激光扫描仪 特集 第1卷
激光雷达用多面体反射镜和激光扫描仪 特集 第1卷
激光雷达用多面体反射镜和激光扫描仪 特集 第1卷
第 1 章
激光雷达扫描探测的演变
可变式视场角激光雷达在自动驾驶车辆中的优势
自动驾驶配备各种传感器来确定它们的位置和周围环境。传感器包括,惯性导航系统(INS)与全球卫星定位系统(GPS),摄像机,雷达和激光雷达。激光雷达比传统毫米波雷达具有更高的分辨率,并且黑暗环境中也可以检测。
本文讨论使用激光雷达的优化方案,以避免车辆路径中的碰撞。涉及激光雷达为了创建三维图像,快速扫描一个或多个二维红外激光扫描在内。 在这里,我们将使用带有振镜扫描仪的多边形激光扫描器在可变的垂直扫描角度内移动一个或多个激光,将比较以固定的垂直扫描角旋转雷达和检测器的垂直阵列。
众所周知,激光雷达扫描技术是旋转激光垂直阵列,让垂直方向360度水平扫描。典型的配置有30度扫描的16个激光器的垂直阵列。垂直分辨率为2度。在图1中示出了30度扫描。
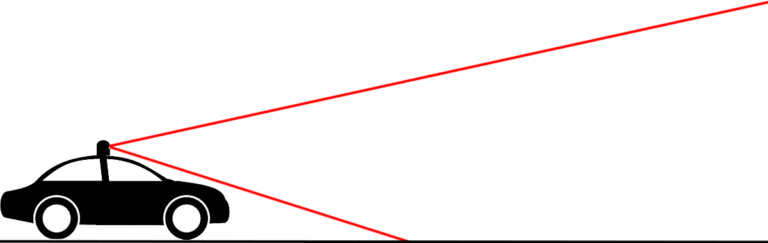
[图 1] 用于避免碰撞的30度激光雷达扫描
30度垂直扫描可以检测,自动驾驶车辆前方靠近的道路上的物体,也可以检测到上下斜坡的停车场的障碍物。固定的2度垂直分辨率,在10米的距离处提供350毫米的光束间距。光束间距在50米的距离上增加到1.75米,使得很难探测到行人或汽车,在100米的距离上增加到3.5米,使得很难探测到卡车。
接近山丘时,感兴趣的区域可以20度扫描,如下面的图2所示。
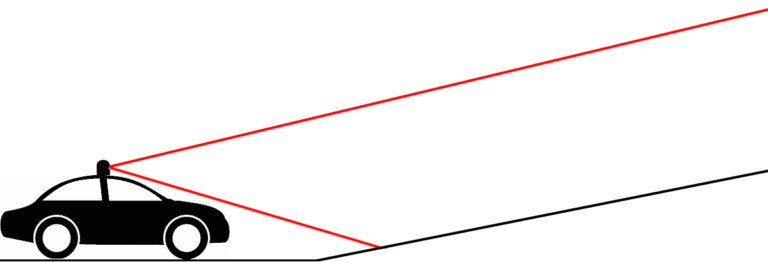
[图 2] 激光雷达20度扫描接近山丘
在山顶上,感兴趣的区域可以立即向下移动,10度扫描。如下面的图3所示。
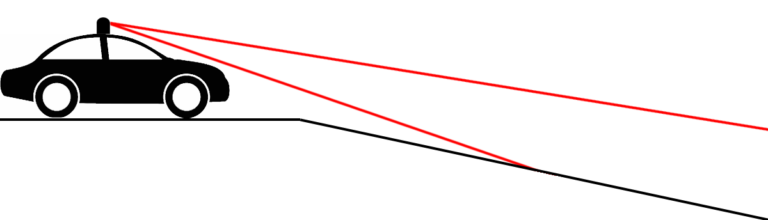
[图 3] 激光雷达10度扫描爬山
以公路速度行驶,感兴趣的区域可以水平10度扫描。。如下面的图4所示。

[图 4] 激光雷达高速驱动10度扫描
如果激光雷达的多边形/振镜扫描只有16线垂直分辨率(如上图1所示)。在高速行驶时将低速时的入射角30度降低到10度,使分辨率提高三倍,从而在更高速度下提供更长的防撞范围。
多边形/振镜激光雷达系统,如何把入射角适应于不断变化的环境呢? 在低速时,入射角30度扫描可用于AV前方里,方便扫描车辆上方的停车障碍物。 随着速度的增加,停止距离也增加,需要更长的扫描距离。这时无需寻找停车障碍物,所以无需看车辆前方两米,因此入射角缩小与速度有关。
至于接近山顶,激光雷达会定期(取决于速度,可每秒钟一次)快速探测哪处需要调整入射角。 该过程还将自动补偿由于道路中的负载,加速,制动和颠簸引起的车辆俯仰。
旋转激光器与旋转激光束。16组垂直激光器和探测器的旋转头很昂贵的。增加更多激光器和探测器以提高分辨率会增加此类激光雷达的成本和尺寸。
多边形扫描仪比带有16个激光器和探测器,旋转得快得多。 因此,多边形扫描仪能够以较少的激光获得较高分辨率的图像,并且针对感兴趣区域有效地扫描。
